Prodotti






SCKR1-6200 Avviatore statico intelligente per motori in linea
Panoramica del prodotto
L'avviatore graduale SCKR1-6200 ha 6 modalità di avviamento, 12 funzioni di protezione e due modalità veicolo.
MCU come nucleo, controllo digitale intelligente, adatto a vari carichi dell'avviamento del motore asincrono del mouse; può far sì che il motore in qualsiasi condizione possa avviarsi dolcemente, è dotato di sistema di resistenza di protezione, riduce l'impatto della corrente di avviamento sulla rete elettrica, per garantire un avviamento automatico affidabile del motore: dolce e arrestato, può eliminare il sistema di resistenza dell'impatto inerziale.
Caratteristiche tecniche del prodotto
Tensione di funzionamento del circuito principale: AC380V(+10%~- 25%);
Corrente di funzionamento del circuito principale: 22 A~560 A;
Frequenza del circuito principale: 50 Hz/60 Hz (±2%);
Tempo di salita graduale: 2~60s;
Tempo di arresto graduale: 0~60s;
Fattore di limitazione della corrente: 1,5~5,0Ie;
Tensione di avvio: 30%~70%Ue;
Modalità di raffreddamento: raffreddamento tramite ventola;
Comunicazione: comunicazioni seriali RS485;
Tempo di avvio: ≤20/ora
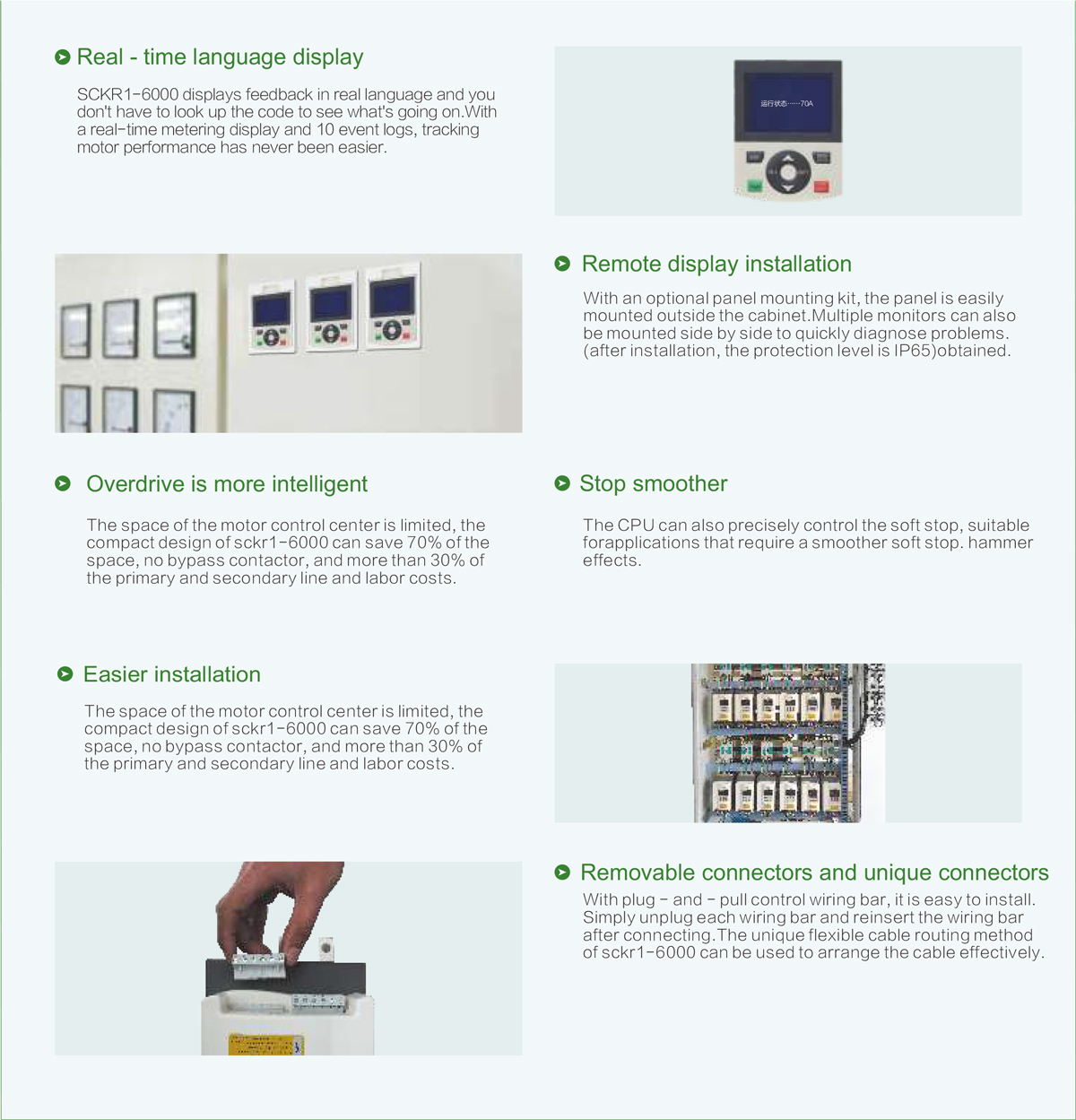
Caratteristica tecnica
Sono disponibili sei parametri di avviamento opzionali per facilitare l'avvio di carichi motore diversi tramite un avviatore graduale del motore;
Funzione di memoria dinamica dei guasti, facile individuazione della causa del guasto;
Funzioni complete di protezione del motore
LED o display a LED;
Profibus/Modbus Sono disponibili due protocolli di comunicazione;
1. Struttura compatta, facile da installare e da usare;
Il menu è raggruppato in base alla funzione, il che lo rende facile da usare;
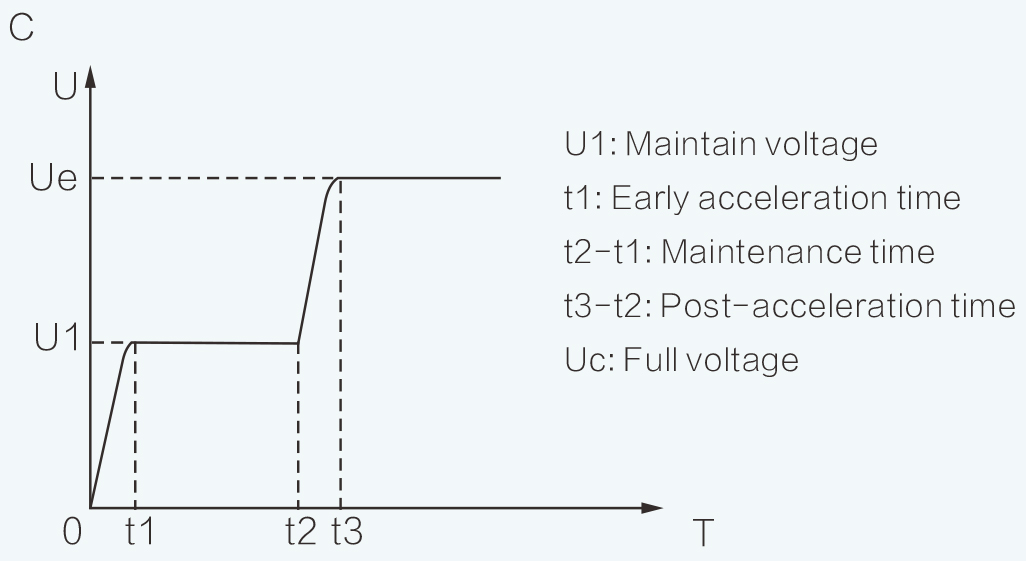
Modalità di azione a scatto
Forma d'onda di uscita della modalità di avviamento di emergenza. Questa modalità di avviamento può essere selezionata quando il motore non può essere avviato sotto un carico elevato a causa dell'influenza della forza di attrito statico. All'avvio, applicare prima un'alta tensione fissa al motore per un periodo di tempo limitato per superare la forza di attrito statico del carico del motore e farlo ruotare, quindi avviare il motore limitando la corrente (figura 1) o la pendenza della tensione (figura 2).


Modalità di avvio e livello di protezione
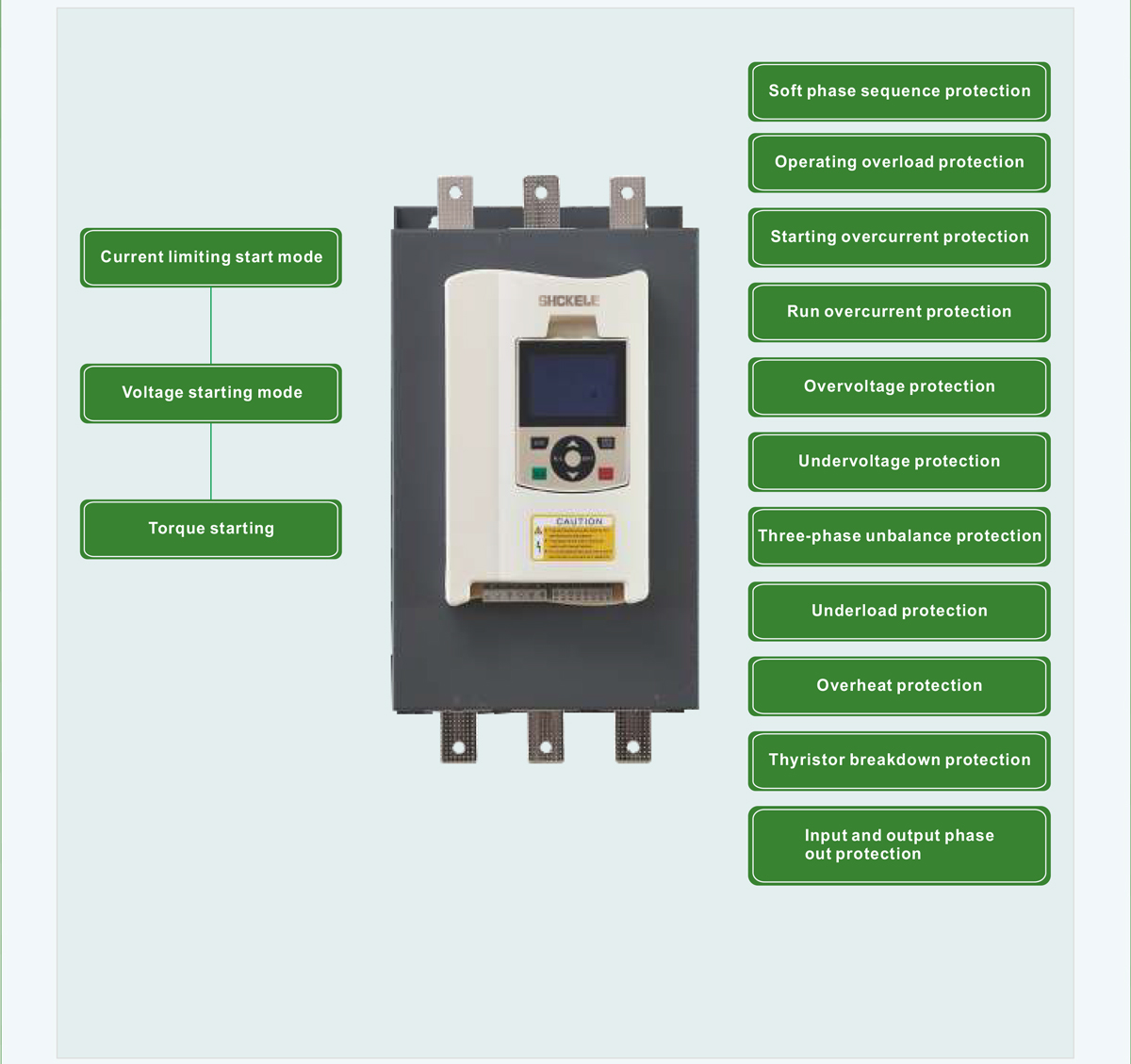
Introduzione alla funzione di avviamento graduale

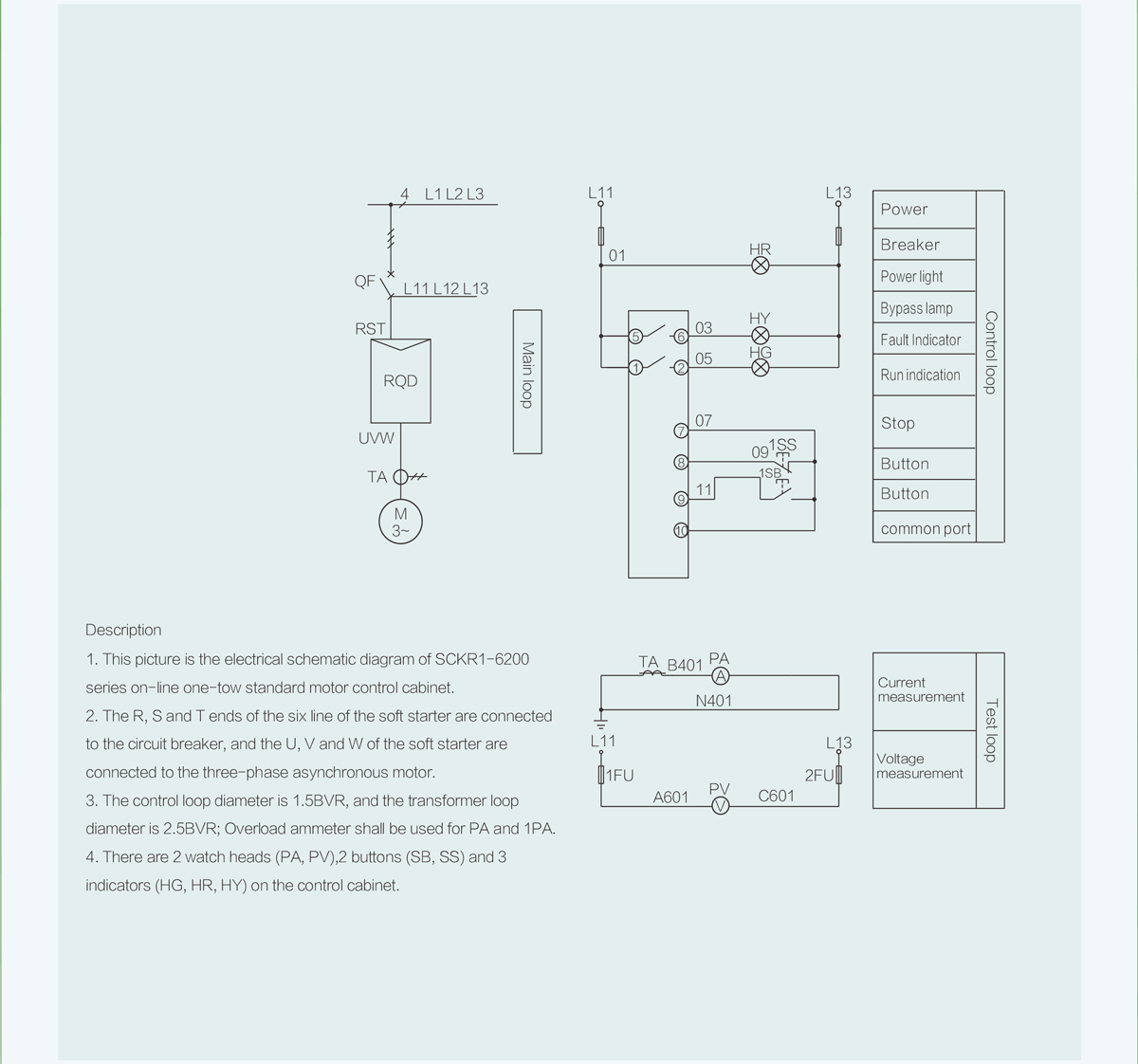
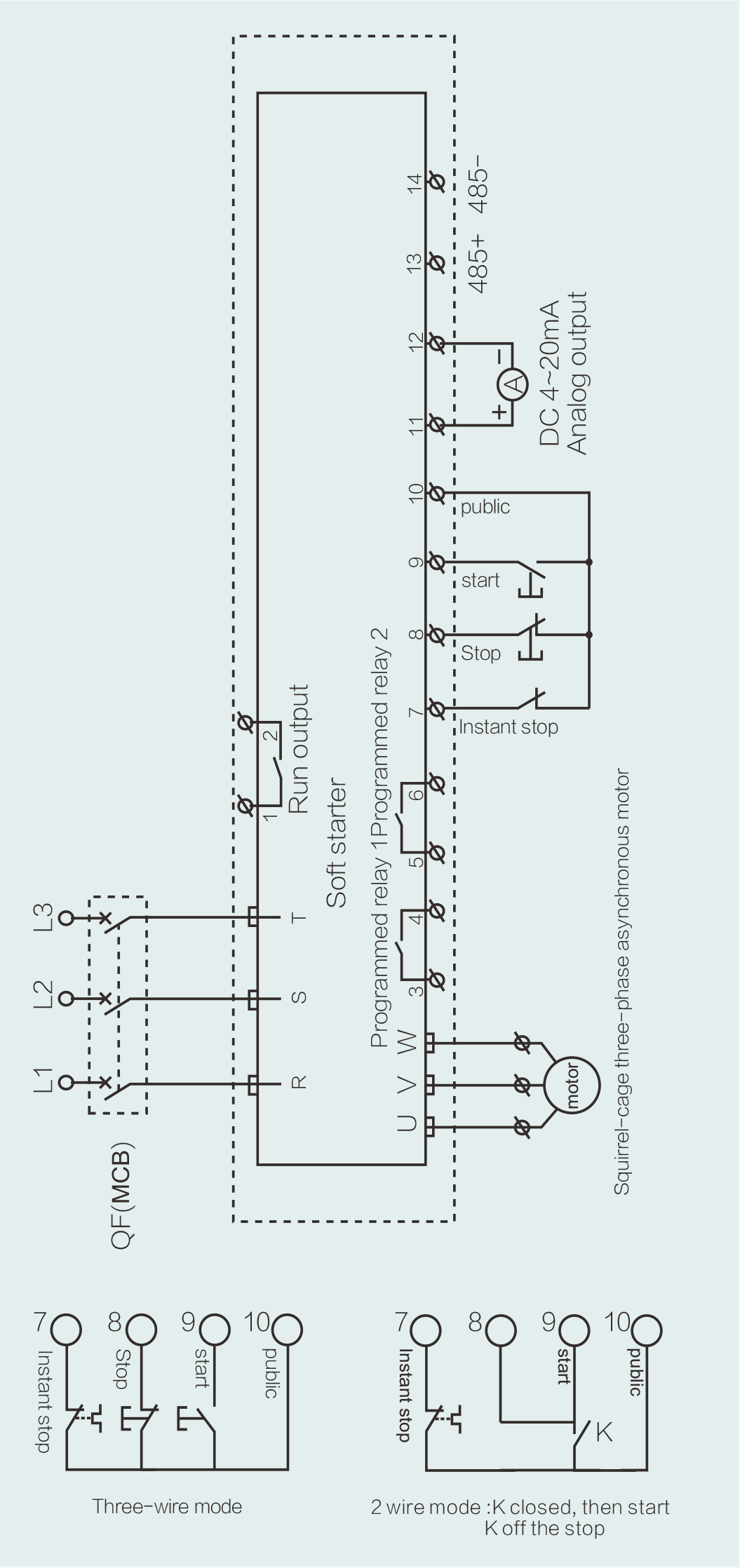
Schema elettrico esterno
Aspetto e dimensioni di montaggio dell'avviatore dolce
Generale
Gamma di corrente..................................11A-1260A (nominale)
Alimentazione elettrica
ingresso di rete (R,S,T)
I terminali (1) e (2) sono uscite operative: vengono utilizzati per controllare l'indicazione di funzionamento (uscita). Normalmente sono contatti passivi aperti e si chiudono all'avvio corretto.
Capacità di contatto: AC250V/5A.
I terminali 3 e 4 sono l'uscita 1 del relè programmabile: il tempo di ritardo è impostato dall'uscita programmabile 1 di A12 e la modalità di azione è impostata dal relè programmabile 1 di A11. È un contatto passivo normalmente aperto, chiuso quando l'uscita è attiva. Valori possibili: 0: Nessuna azione 1: Azione all'accensione 2: Azione di avvio graduale 3: Azione di bypass 4: Azione di arresto graduale 5: Azione di funzionamento 6: Azione di standby 7: Azione di guasto 8: Azione di arrivo corrente. La portata del contatto è AC250V/5A.
I terminali ⑤ e ⑥ sono l'uscita 2 del relè programmabile: il tempo di ritardo è impostato dal ritardo dell'uscita programmabile 1 A14 e la modalità di azione è impostata dal relè programmabile 1 A13. È un contatto passivo normalmente aperto, chiuso quando l'uscita è effettiva.
0: Nessuna azione 1: Azione di accensione 2: Azione di avvio graduale 3: Azione di bypass 4: Azione di arresto graduale 5: Azione di esecuzione 6: Azione di standby 7: Azione di errore 8: Azione di arrivo corrente La capacità del contatto è AC250V/0,3A.
Il terminale ⑦ è un'uscita transitoria: questo terminale deve essere cortocircuitato con il terminale 0 quando l'avviatore statico funziona normalmente. Quando questo terminale è aperto verso il terminale 0, l'armadio dell'avviatore statico smette di funzionare incondizionatamente ed è in stato di protezione da guasto. Questo terminale può essere controllato dal punto di uscita normalmente chiuso del dispositivo di protezione esterno.
Quando FA è impostato su 0 (protezione primaria), questa funzione del terminale è disabilitata.
I terminali 8, 9 e 0 sono terminali di ingresso per i pulsanti di avvio e arresto controllati esternamente. Il metodo di cablaggio è mostrato in figura.
Terminali (11) e (12) per uscita analogica CC 4~20mtA: utilizzati per il monitoraggio in tempo reale della corrente del motore, 20mA completi che indicano la corrente del motore per la corrente nominale dell'avviatore statico 0,5-5 volte, può essere impostata dal parametro A17,4-20mA limite superiore di corrente.
Può essere collegato all'osservazione dell'amperometro CC 4~20mA.
I terminali (13) e (14) sono uscite di comunicazione RS485 e forniscono un software per computer cinese per il debug e il controllo remoto. Non scollegare la linea del terminale esterno; in caso contrario, l'armadio di avviamento graduale potrebbe danneggiarsi.
temperatura di esercizio ............................-10℃-40℃
temperatura di conservazione...........................-10℃+40℃
umidità............................5% al 95% di umidità relativa
| Tensione di tasso | Corrente nominale | Potenza nominale | Display | Parametro | Proteggere | terminale | Sovraccarico |
| 220V | 11A-1260A | 3kW-350kW | cinese Schermo LCD | 62 | 12 | 14 | Regolabile |
| 380V | 11A-1260A | 5,5 kW-630 kW | |||||
| 660 V | 11A-1260A | 5,5 kW-1000 kW |
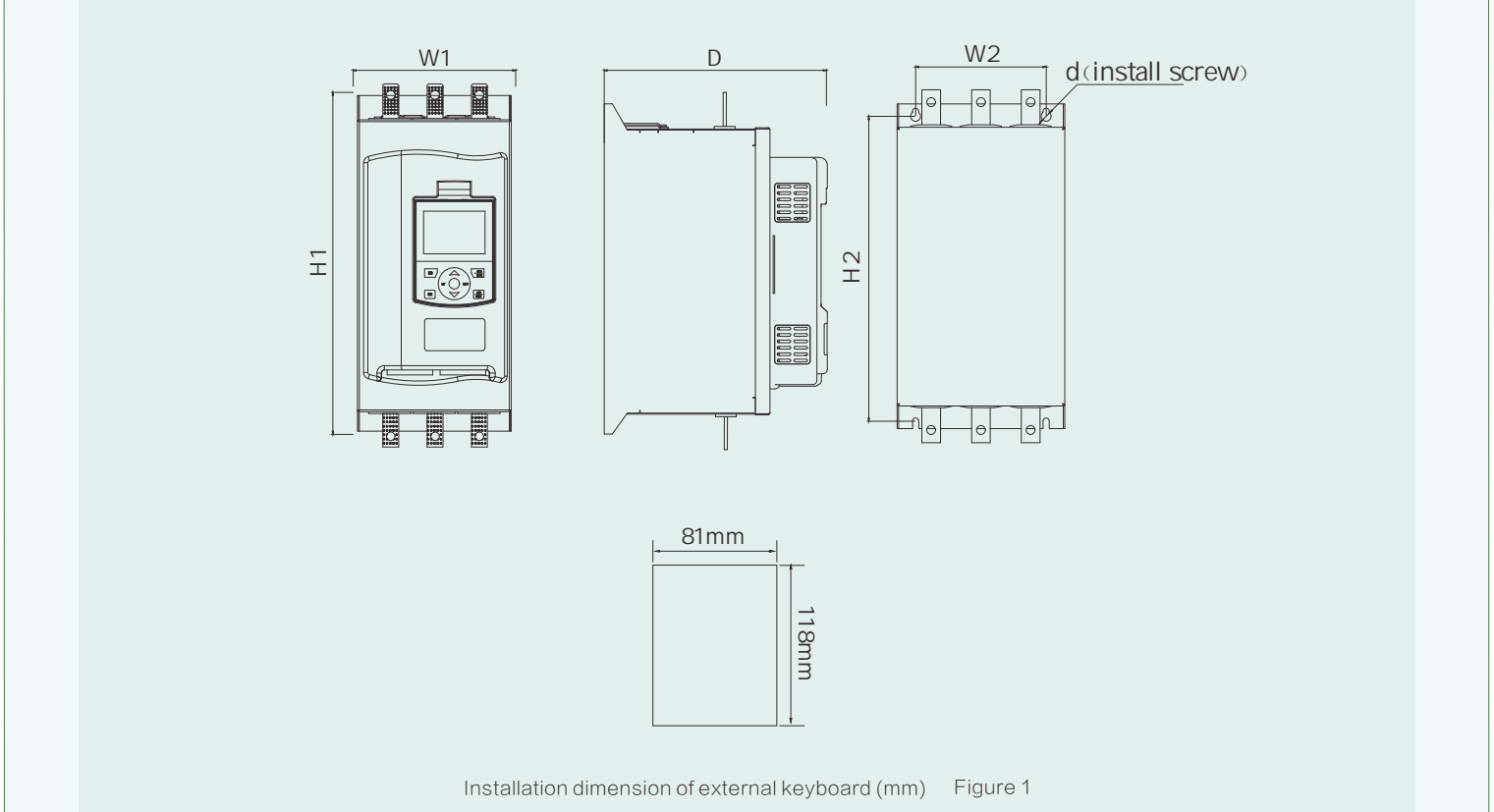
| Specifiche | Dimensione del contorno (mm) | Dimensioni di installazione (mm) | Vista esterna | ||||
| W1 | H1 | D | W2 | H2 | d | ||
| 5,5 kW-55 kW | 145 | 340 | 214 | 85 | 298 | M6 | Figura 1 |
| 75 kW | 172 | 355 | 222 | 140 | 300 | M6 | |
| 90KW-115KW | 210 | 394 | 255 | 150 | 343 | M8 | |
| 132 kW-160 kW | 330 | 496 | 265 | 260 | 440 | M8 | |
| 185KW-350KW | 490 | 608 | 305 | 335 | 542 | M8 | |
| 400-630 kW | 680 | 840 | 418 | 350 | 780 | M10 | |
Schema elettrico di base dell'avviatore statico

Schema elettrico SCKR1-6200